publications
2025
- CHI EA
 Modeling Higher-order Human Beliefs Using the Justified Perspective ModelWanchun Li, Chenyuan Zhang, Weijia Li, Guang Hu, and Yangmengfei XuIn Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, Apr 2025
Modeling Higher-order Human Beliefs Using the Justified Perspective ModelWanchun Li, Chenyuan Zhang, Weijia Li, Guang Hu, and Yangmengfei XuIn Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, Apr 2025This study explores the feasibility of modeling higher-order human beliefs using a generalizable formalization based on the epistemic planning framework, the Justified Perspective (JP) model. Specifically, it investigates (a) whether individuals exhibit consistent belief reasoning abilities and (b) whether these abilities can be inferred from their nesting capabilities within the JP model framework. To address these questions, we propose a novel processing algorithm inspired by Item Response Theory to estimate reasoning abilities based on participants’ responses to diverse reasoning scenarios. A pilot experiment was conducted to validate the methodology and refine the experimental design for future studies. While the small sample size limits the statistical significance of the findings, preliminary results suggest the JP model’s potential to capture human higher-order beliefs. This work demonstrates the promise of integrating epistemic planning frameworks with human-centered applications, advancing the development of Human Computer Interaction systems capable of understanding and anticipating human cognition.
- HRI
 From Isolation to Connection: Community Service Robots for Social Cohesion and SustainabilityYangmengfei Xu, Suxuan Tian, Guojing Wang, and Bin TangIn 2025 20th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Melbourne, Australia, Mar 2025
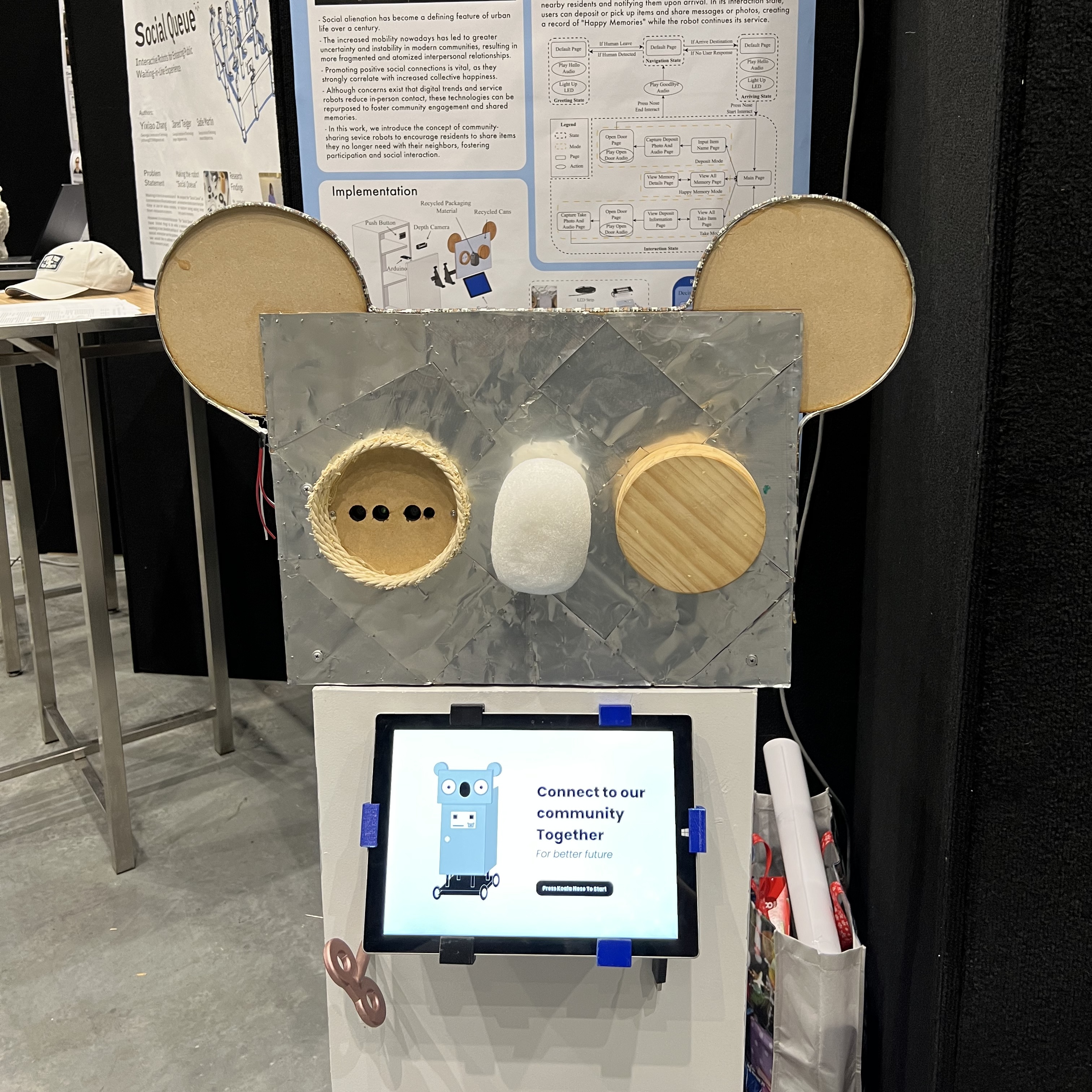
From Isolation to Connection: Community Service Robots for Social Cohesion and SustainabilityYangmengfei Xu, Suxuan Tian, Guojing Wang, and Bin TangIn 2025 20th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Melbourne, Australia, Mar 2025Social alienation challenges community cohesion, particularly in diverse societies like Australia. This study introduces the Neighbor Koala, a community-sharing robot designed to foster social connections and promote sustainability. By facilitating item exchanges and capturing shared memories, it aims to address isolation while reducing waste. Leveraging the sociological concept of the “gift”, it strengthens emotional bonds and community belonging. This work provides a cornerstone for future studies on how robotics can enhance social well-being and environmental responsibility in urban contexts.
2024
- Unmanned Syst
 A Geometry-Based Distributed Connectivity Maintenance Algorithm for Discrete-time Multi-Agent Systems with Visual Sensing ConstraintsUnmanned Systems, 2024
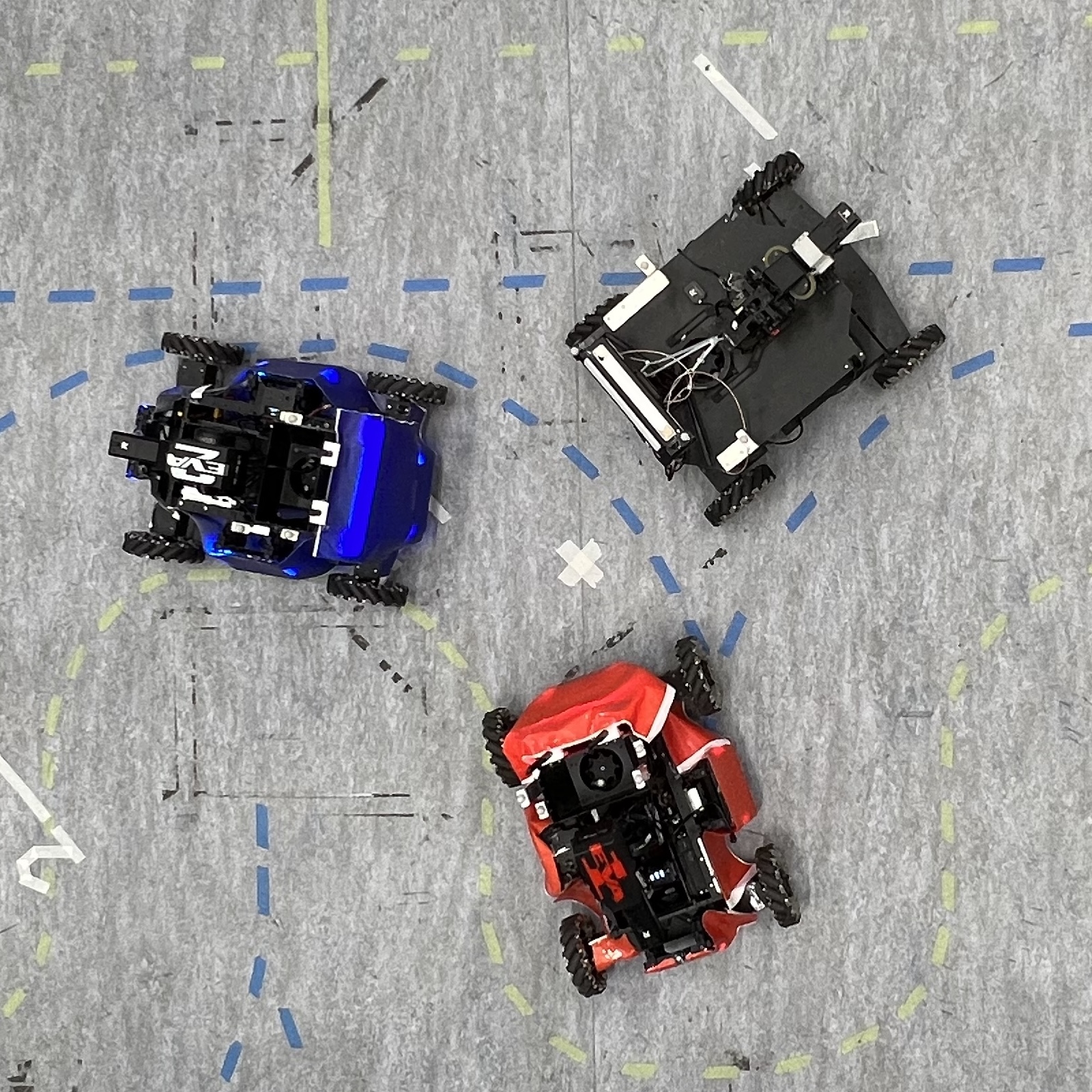
A Geometry-Based Distributed Connectivity Maintenance Algorithm for Discrete-time Multi-Agent Systems with Visual Sensing ConstraintsUnmanned Systems, 2024This paper presents a novel approach to address the challenge of maintaining connectivity within a multi-agent system (MAS) when utilizing directional visual sensors. These sensors have become essential tools for enhancing communication and connectivity in MAS, but their geometric constraints pose unique challenges when designing controllers. Our approach, grounded in geometric principles, leverages a mathematical model of directional visual sensors and employs a gradient-descent optimization method to determine the position and orientation constraints for each sensor based on its geometric configuration. This methodology ensures network connectivity, provided that initial geometric constraints are met. Experimental results validate the efficacy of our approach, highlighting its practical applicability for a range of tasks within MAS.
- Unmanned Syst
 On Active Disturbance Rejection Control for Unmanned Tracked Ground Vehicles with Nonsmooth DisturbancesUnmanned Systems, 2024
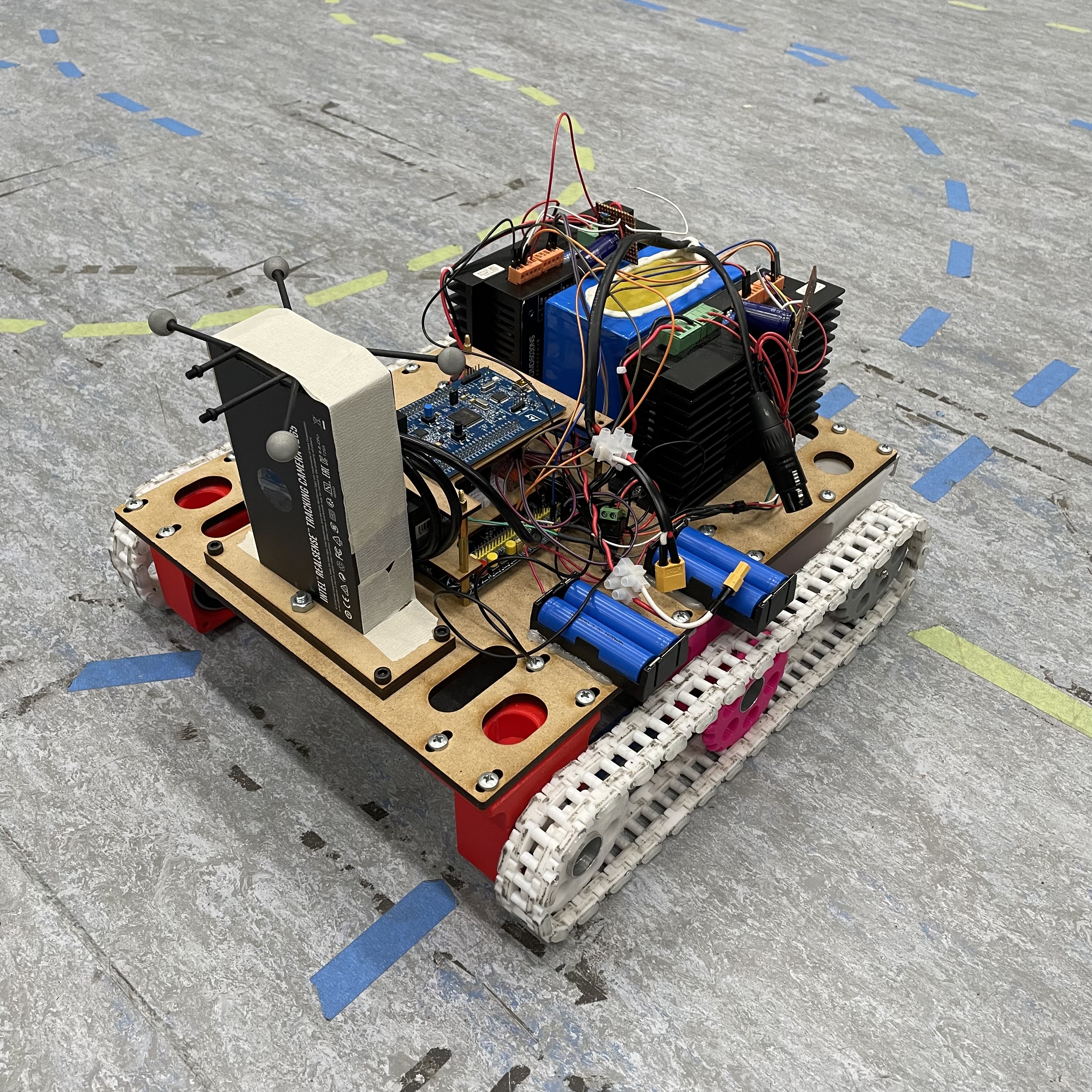
On Active Disturbance Rejection Control for Unmanned Tracked Ground Vehicles with Nonsmooth DisturbancesUnmanned Systems, 2024This paper proposes robust controllers for a class of unmanned tracked ground vehicles (UTGVs), which are built to autonomously clean carryback or spillage from the conveyor belts used in the mining industry. The UTGV, a nonholonomic system in its nature, needs to follow a given path in a harsh environment with large uncertainties due to the time-varying mass and inertia when the UTGV loads and unloads as well as unknown frictions and flatness of the ground. Moreover, the input constraints coming from motors do exist. It is usually hard to design robust controllers for such complex systems. By utilizing the available autonomous driving system, which is designed to be compatible with the existing remote motion controller in unmanned systems to generate autonomous ability, this paper uses the off-the-shelf motion planner to calculate desired linear and angular velocities based on the given path and sensor perceptions. Consequently, the control design can be simplified as two decoupled linear time-invariant scalar dynamic systems with uncertainties, making the active disturbance rejection controller (ADRC) applicable. By carefully designing the parameters of ADRC with the help of an extended state observer (ESO), it is shown that the proposed ADRC and ESO can achieve good tracking performance in the presence of input saturation and can handle nonsmooth disturbances. The proposed simulation results and experimental results support the theoretical findings.
2023
- IROS WS
 PyPose v0.6: The Imperative Programming Interface for RoboticsZitong Zhan, Xiangfu Li, Qihang Li, Haonan He, Abhinav Pandey, Haitao Xiao, Yangmengfei Xu, Xiangyu Chen, Kuan Xu, Kun Cao, and 26 more authorsIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop, 2023
PyPose v0.6: The Imperative Programming Interface for RoboticsZitong Zhan, Xiangfu Li, Qihang Li, Haonan He, Abhinav Pandey, Haitao Xiao, Yangmengfei Xu, Xiangyu Chen, Kuan Xu, Kun Cao, and 26 more authorsIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Workshop, 2023PyPose is an open-source library for robot learning. It combines a learning-based approach with physicsbased optimization, which enables seamless end-to-end robot learning. It has been used in many tasks due to its meticulously designed application programming interface (API) and efficient implementation. From its initial launch in early 2022, PyPose has experienced significant enhancements, incorporating a wide variety of new features into its platform. To satisfy the growing demand for understanding and utilizing the library and reduce the learning curve of new users, we present the fundamental design principle of the imperative programming interface, and showcase the flexible usage of diverse functionalities and modules using an extremely simple Dubins car example. We also demonstrate that the PyPose can be easily used to navigate a real quadruped robot with a few lines of code.
2022
- MPhil Thesis
 Inducing human movement pattern changeYangmengfei XuThe University of Melbourne, 2022
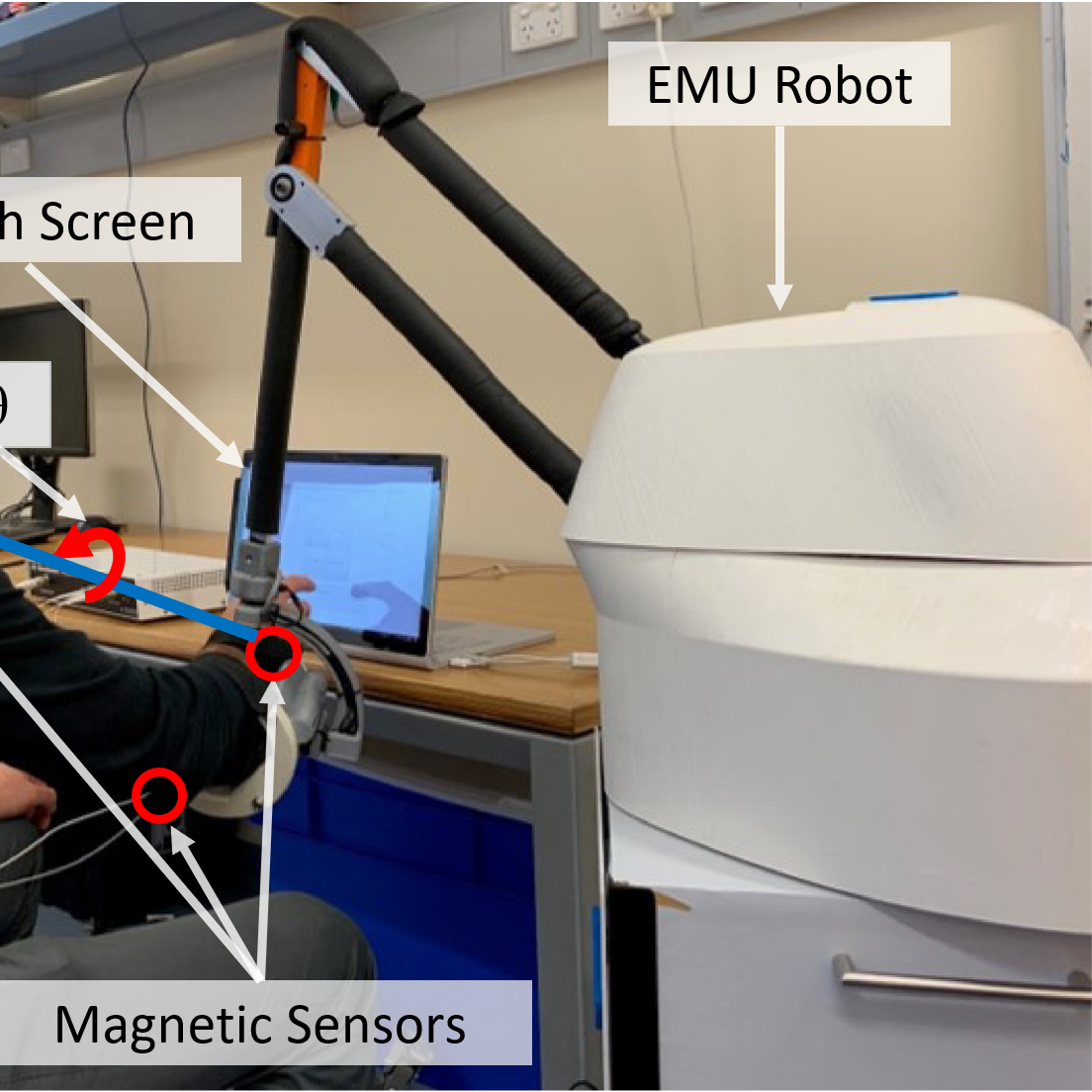
Inducing human movement pattern changeYangmengfei XuThe University of Melbourne, 2022Human’s movement pattern shaping is widely used in neurorehabilitation and sports training. Recent studies have shown that robotic device has its potential to become an efficient tool for clinicians to induce this change. To understand human’s movement, different computational models were proposed and studied to explain how human resolves their redundancy. Although some arguments are still existing, the general idea of optimization has been well accepted. Based on these computational models, the motor learning studies showed that through practice in the new environment, the reward-based optimization could drive human to search for a better movement pattern 1) to maximize the performance and 2) to minimize the motor cost. Leveraging this optimization idea in human motor learning, this work aims to induce the movement pattern changes in an experimental setup solely relying on the motor cost without any explicit kinematic error. In this strategy, the intervention space and adaptation space are decoupled: while the force field only applies to the hand linear velocity, the adaptation is expected to happen in the redundant arm joint space (i.e. the swivel angle). This work, therefore, explores the following topics: * Investigating the feasibility of inducing human motor adaptation in the redundant space by providing a task space intervention without explicit error feedback or instruction; * Evaluating the contribution of a progressively changing goal in this implicit motor adaptation, assuming that this adaptation may be further promoted through subtle prompts to explore the cost space; * Demonstrating a motor cost analysis based on the upper limb kinematics and dynamics model to validate the relationship between observations and motor cost.
2021
- TNSRE
 Inducing Human Motor Adaptation Without Explicit Error Feedback: A Motor Cost ApproachIEEE Transactions on Neural Systems and Rehabilitation Engineering, 2021
Inducing Human Motor Adaptation Without Explicit Error Feedback: A Motor Cost ApproachIEEE Transactions on Neural Systems and Rehabilitation Engineering, 2021Recent studies have shown that motor adaptation is an optimisation process on both kinematic error and effort. This work aims to induce a motor adaption in an experimental setup solely relying on the effort without any explicit kinematic error. In this experiment, the intervention space and adaptation space are decoupled: while the force field only applies to the hand linear velocity, the adaptation is expected to happen in the arm joint null space (i.e. the swivel angle). The primary hypothesis is that such an effort-based force field can induce a movement pattern change in an indirect manner. Secondarily, assuming that this adaptation may be further promoted through subtle prompts to explore the cost space, a variation of the approach with a progressive goal is also tested. Twenty naive subjects were allocated into two groups with slightly different implementations of the force field: one with a Constant Goal (CG) and another one with a Progressively changing Goal (PG). Subjects were asked to perform reaching tasks while attached to a 3D manipulandum. During the intervention, the device applied a resistive viscous force at the subject’s hand as a function of the subject’s swivel angle to encourage an increase of the latter. Significant increases of the swivel angle of 4.9° and 6.3° were observed for the CG and the PG groups respectively. This result confirms the feasibility of inducing motor adaptation in the redundant joint space by providing a task space intervention without explicit error feedback.
2019
- Sensors
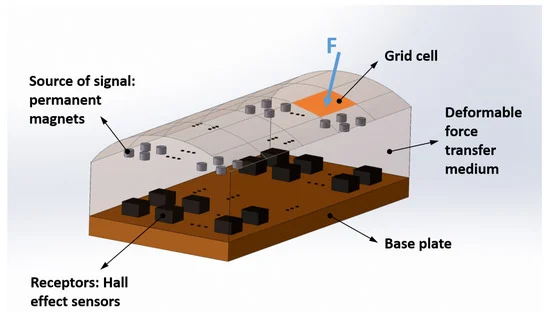 Magnetic-based Soft Tactile Sensors with Deformable Continuous Force Transfer Medium for Resolving Contact Locations in Robotic Grasping and ManipulationSensors, 2019
Magnetic-based Soft Tactile Sensors with Deformable Continuous Force Transfer Medium for Resolving Contact Locations in Robotic Grasping and ManipulationSensors, 2019The resolution of contact location is important in many applications in robotics and automation. This is generally done by using an array of contact or tactile receptors, which increases cost and complexity as the required resolution or area is increased. Tactile sensors have also been developed using a continuous deformable medium between the contact and the receptors, which allows few receptors to interpolate the information among them, avoiding the weakness highlighted in the former approach. The latter is generally used to measure contact force intensity or magnitude but rarely used to identify the contact locations. This paper presents a systematic design and characterisation procedure for magnetic-based soft tactile sensors (utilizing the latter approach with the deformable contact medium) with the goal of locating the contact force location. This systematic procedure provides conditions under which design parameters can be selected, supported by a selected machine learning algorithm, to achieve the desired performance of the tactile sensor in identifying the contact location. An illustrative example, which combines a particular sensor configuration (magnetic hall effect sensor as the receptor, a selected continuous medium and a selected sensing resolution) and a specific data-driven algorithm, is used to illustrate the proposed design procedure. The results of the illustrative example design demonstrates the efficacy of the proposed design procedure and the proposed sensing strategy in identifying a contact location. The resulting sensor is also tested on a robotic hand (Allegro Hand, SimLab Co) to demonstrate its application in real-world scenarios.